


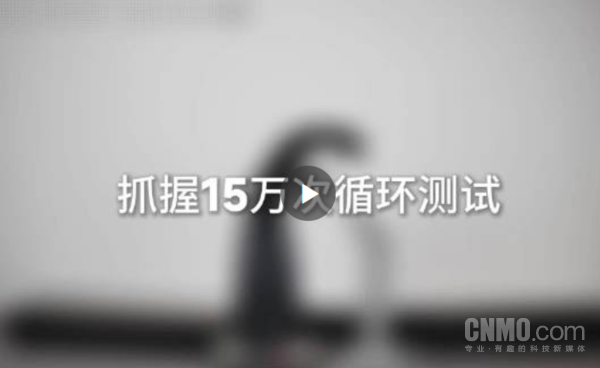
【CNMO科技消息】3月27日,小米技术团队公布了仿生手的最新研发进展。在Xiaomi CyberOne的基础上,团队对仿生手进行了全面设计改造,压缩60%的体积使其完全与工人手部尺寸一致,全掌触觉传感器覆盖面积增加至8200平方毫米,实现了15万次以上的抓握操作循环寿命,并增加了仿生汗腺设计提升主动散热能力,向打造一个能稳定用于工厂作业的仿生手稳步迈进。
小米机器人
根据官方公布的技术细节,新款仿生手实现了多项关键指标提升:
1、体积压缩:从228mm×105mm×64mm压缩至187mm×88mm×36mm,体积减少约60%,与人手尺寸完全一致;
2、自由度提升:增加50%自由度,其中主动自由度提升83%;
3、触觉感知:全掌触觉传感器覆盖面积增至8200平方毫米,实现更丰富的触觉反馈;
4、循环寿命:在实际抓握重复操作中实现15万次以上的循环寿命,完整61小时测试视频已同步公开。
为解决散热难题,小米团队模拟人类汗腺方式设计主动散热系统。在紧凑的小臂结构中,采用金属3D打印制作液冷循环通道,通过微泵将电机热量转移至蒸发区,利用蒸发吸热快速降温。实际测试中,仿生汗腺系统每分钟可蒸发0.5毫升水,提供约10瓦的主动散热能力。

目前,触觉手套已成为研发过程中的优选方案。它既能实现指尖、指腹和掌心的全掌触觉覆盖,又能让人直接穿戴采集操作数据,高效构建大批量操作数据集。手套方式同时缓解了磨损失效问题,维护更加方便。
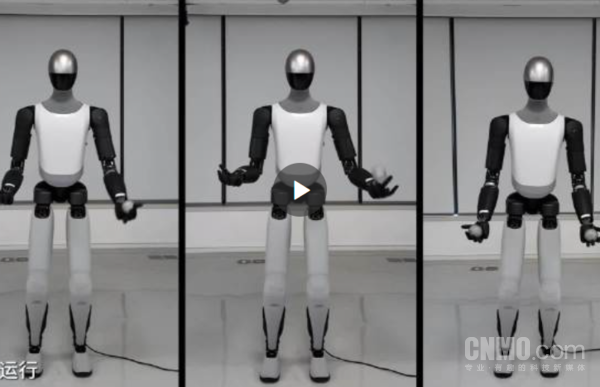
为了更好复用通过人手采集的数据,仿生手被设计成与人手1:1比例,具备近似构型。在可达空间、驱动能力、惯量分布及操控响应等方面也尽量对标人手,减少仿真和真机差异。通过对人手抓握数据进行采集,团队在仿真环境中融合触觉信息,应用模仿及强化学习策略对大量数字零件进行学习和训练,直到生成接近拟人的抓握姿态。
小米已同步公开相关技术资源:15万次抓握循环测试无加速原始视频已上线;TacRefineNet和Xiaomi-Robotics-0相关工作可通过官网查阅;相关代码已在GitHub平台开源。
小米技术团队表示,希望通过这些优化,打造一个能稳定用于工厂作业的仿生手,将作业成功率提升至接近100%。“探索物理智能的边界,我们从不止步。欢迎加入,一起在具身智能领域,拥抱未来。”
本文转自:凤凰网科技
原文地址: https://tech.ifeng.com/c/8rpdN2csVm0
小同爱分享2 个月前
命没了还有轮回,钱没了,死都不甘心。 - 小同爱分享
小同爱分享5 个月前
疫情,就是让人抑郁,又没了感情。 - 小同爱分享